$ make clean |
nsh> ps |
nsh> task_test |
nsh> task_test |
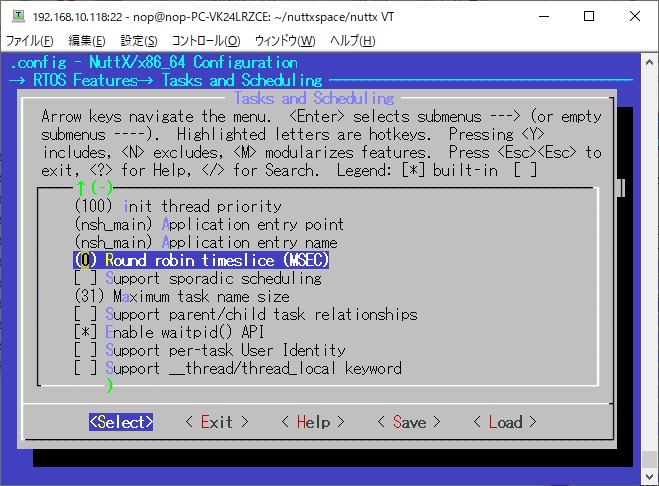
task_fork("myTask1",
prio_std, 10000000, 0); |
nsh> task_test test1 |
| Prio |
① |
② |
③ |
④ |
⑤ |
⑥ |
⑦ |
--- |
⑧ |
⑨ |
⑩ |
|
| nsh |
100 |
獲得→放棄 | 獲得→放棄 | |
獲得→放棄 | |||||||
| task_test |
100 |
獲得→終了 | ||||||||||
| myTask1 |
100 |
獲得→剥奪 | 獲得→剥奪 | 獲得→終了 | ||||||||
| myTask2 |
100 |
開始→剥奪 | 獲得→剥奪 | 獲得→終了 |
task_fork("myTask1",
prio_std, 10000000, 0); |
nsh> task_test test2 |
| Prio |
① |
② |
③ |
④ |
⑤ |
⑥ |
⑦ |
--- |
⑧ |
⑨ |
⑩ |
⑪ |
⑫ |
|
| nsh |
100 |
獲得→放棄 | 獲得→放棄 | 獲得→放棄 | 獲得→放棄 | |||||||||
| task_test |
100 |
獲得→剥奪 | 獲得→終了 | |||||||||||
| myTask1 |
100 |
獲得→剥奪 | 獲得→剥奪 | 獲得→終了 | ||||||||||
| myTask2 |
1 |
獲得→剥奪 | 獲得→終了 |
|||||||||||
| myTask3 |
255 |
獲得→終了 |
task_fork("myTask1",
prio_std, 10000000, 0); |
nsh> task_test test3 |
| Prio |
① |
② |
③ |
④ |
⑤ |
⑥ |
⑦ |
⑧ |
⑨ |
--- |
⑩ |
|
| nsh |
100 |
獲得→放棄 | 獲得→放棄 | |||||||||
| task_test |
100 |
獲得→放棄 | 獲得→剥奪 |
獲得→終了 | ||||||||
| myTask1 |
100 |
獲得→終了 |
||||||||||
| myTask2 |
1 |
獲得→剥奪 | 獲得→放棄 | 獲得→終了 | ||||||||
| myTask3 |
255 |
獲得→終了 |
task_fork("myTask1",
prio_min, 10000000, 0); |
nsh> task_test test4 |
| Prio |
① |
② |
③ |
④ |
⑤ |
⑥ |
⑦ |
⑧ |
⑨ |
⑩ |
|
| nsh |
100 |
獲得→放棄 | 獲得 | ||||||||
| task_test |
100 |
獲得→放棄 | 獲得→剥奪 |
獲得→剥奪 | 獲得→終了 | ||||||
| myTask1 |
1 |
獲得→終了 |
|||||||||
| myTask2 |
255 |
獲得→終了 |
|||||||||
| myTask3 |
255 |
獲得→終了 |
nsh> ps |
nsh> task_test test1 |
nsh> task_test test1 |
| Prio |
① |
② |
③ |
④ |
⑤ |
⑥ |
➆ |
⑧ |
⑨ |
⑩ |
|
| nsh |
100 |
獲得→放棄 | 獲得 | |
|||||||
| task_test |
100 |
獲得→終了 | |||||||||
| myTask1 |
100 |
獲得→終了 | |||||||||
| myTask2 |
100 |
獲得→終了 |
task_fork("myTask1",
prio_std, 100, 1); |
nsh> task_test test5 |
| Prio |
① |
② |
③ |
④ |
⑤ |
⑥ |
⑦ |
--- |
⑧ |
⑨ |
⑩ |
|
| nsh |
100 |
獲得→放棄 | 獲得→放棄 | |
獲得→放棄 | |||||||
| task_test |
100 |
獲得→終了 | ||||||||||
| myTask1 |
100 |
獲得→放棄 | 獲得→放棄 | 獲得→終了 | ||||||||
| myTask2 |
100 |
開始→放棄 | 獲得→放棄 | 獲得→終了 |