$ git clone
https://github.com/nRF24/RF24
$ cd RF24
$ ./configure
[SECTION] Detecting arm compilation environment.
[OK] arm-linux-gnueabihf-gcc detected.
[OK] arm-linux-gnueabihf-g++ detected.
[SECTION] Detecting target machine.
./configure: line 66: warning: command substitution:
ignored null byte in input
[OK] machine detected: SoC=BCM2835, Type=RPi, CPU=armv7l.
[SECTION] Detecting DRIVER
[OK] DRIVER detected:RPi.
[SECTION] Detecting OS.
[INFO] OS detected:LINUX.
[SECTION] Preparing configuration.
[SECTION] Saving configuration.
[SECTION] Cleaning previous builds.
[OK] Finished.
$ make
$ sudo make install
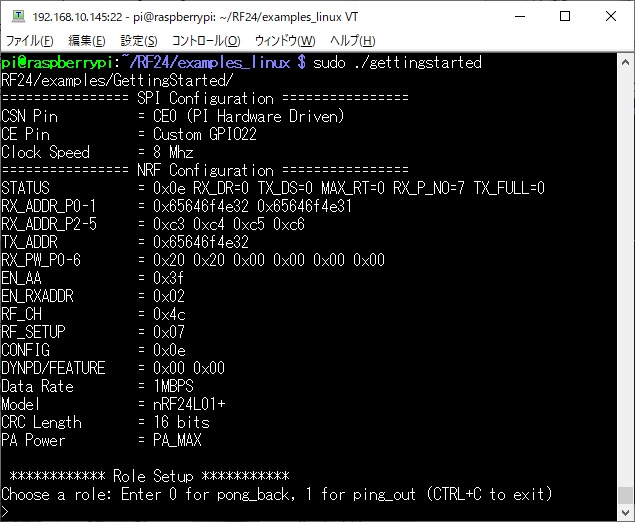
$ cd examples_linux
$ make
|