/*
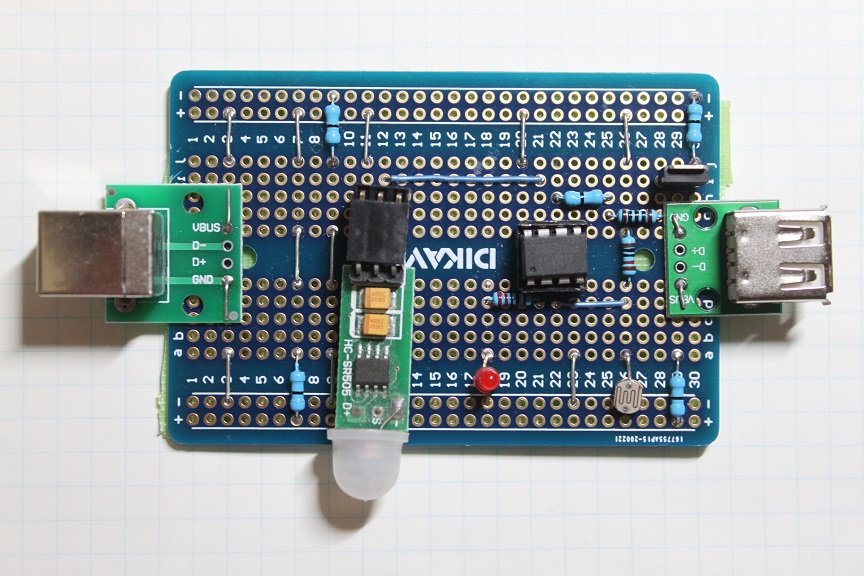
* sample program for HC-SR501 PIR MOTION DETECTOR
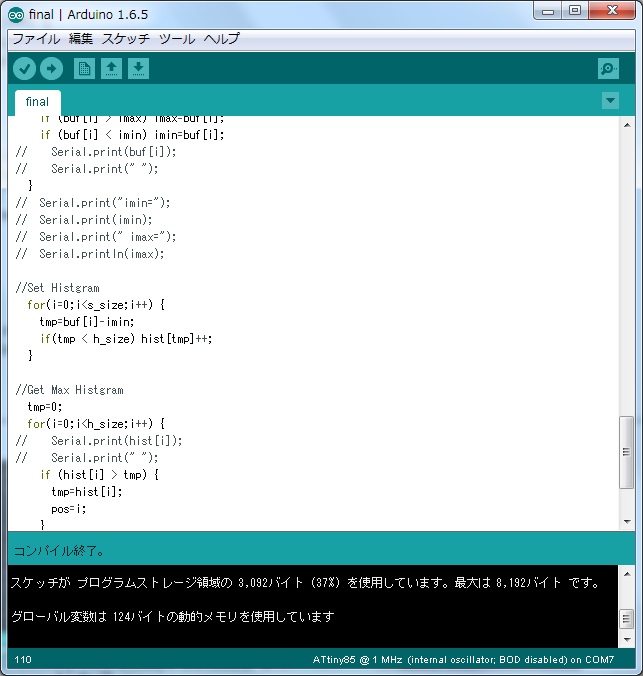
for ATtiny85
*
*
*/
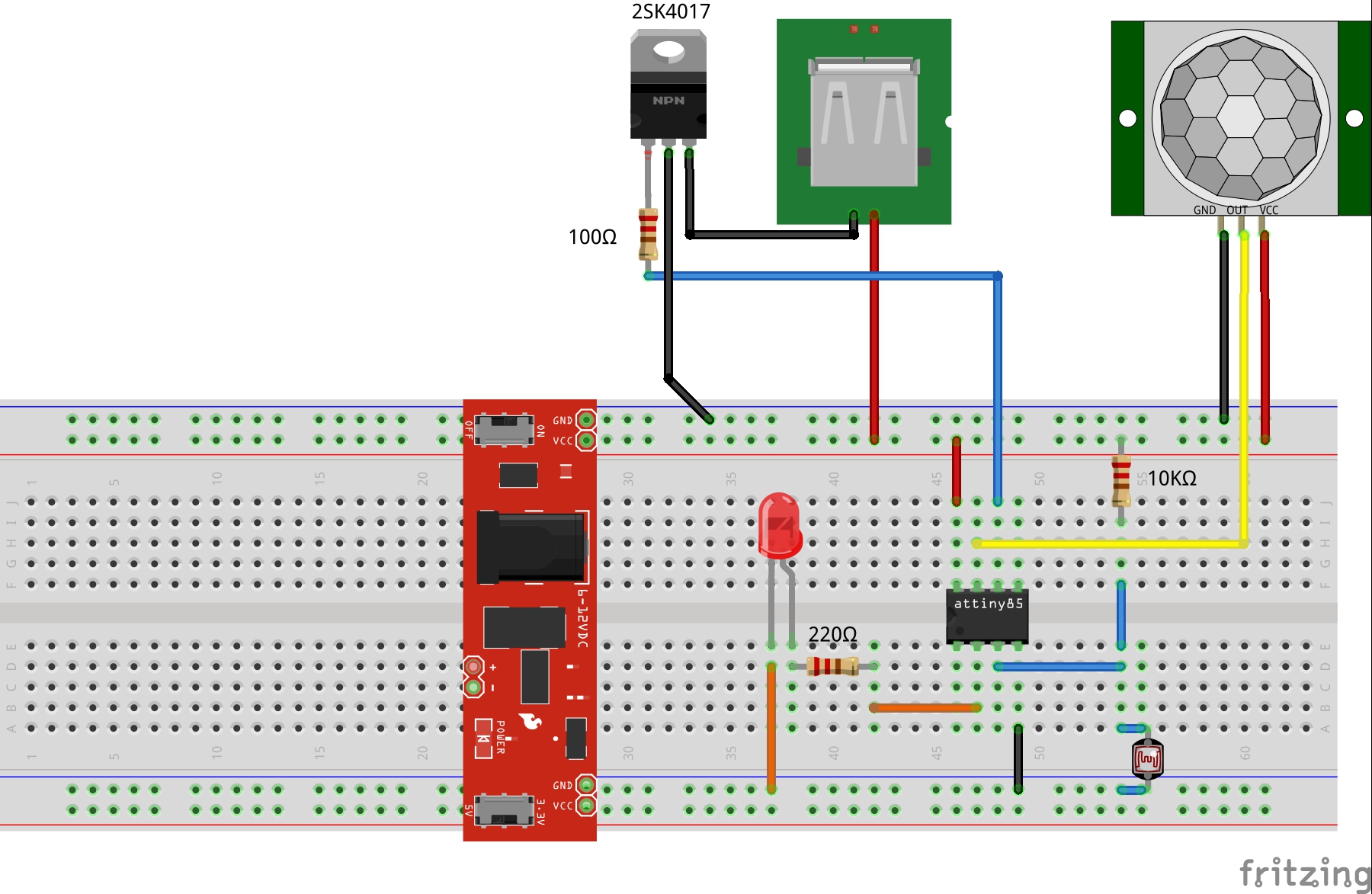
#define outPin 1
#define pirPin 2
#define ledPin 3
#define cdsPin A2
#define interval 30
unsigned long time;
unsigned long etime;
int outFlag;
void setup() {
Serial.begin(9600);
pinMode(outPin,OUTPUT);
pinMode(pirPin,INPUT);
pinMode(ledPin,OUTPUT);
digitalWrite(pirPin,LOW);
digitalWrite(outPin,LOW);
digitalWrite(ledPin,LOW);
outFlag=0;
}
void loop() {
int val;
int A_val;
val = digitalRead(pirPin); //read state of the PIR
if (val == LOW) {
Serial.println("No motion"); //if the
value read is low, there was no motion
digitalWrite(ledPin,LOW);
} else {
Serial.println("Motion!"); //if the
value read was high, there was motion
digitalWrite(ledPin,HIGH);
A_val=MyAnalogRead(cdsPin); //read
value from CDS
Serial.print("A_val=");
Serial.println(A_val);
if (A_val > 800) {
time = millis()/1000;
etime=time+interval; // End
Time
digitalWrite(outPin,HIGH);
outFlag=1;
}
}
Serial.print("outFlag=");
Serial.println(outFlag);
if (outFlag) {
time = millis()/1000;
Serial.print(time);
Serial.print(" ");
Serial.println(etime);
if (time > etime) {
digitalWrite(outPin,LOW);
outFlag=0;
}
}
delay(1000);
}
/*
* Analog Read with HistGram
*/
#define s_size 50 // アナログデータ格納領域
#define h_size 10 // ヒストグラム格納領域
int MyAnalogRead(int analogPin)
{
int buf[s_size];
int hist[h_size];
int imin=1023;
int imax=0;
int A_val;
int tmp;
int pos;
int i;
//Clear Histgram
for(i=0;i<h_size;i++) hist[i]=0;
//Get Analog Data
for(i=0;i<s_size;i++) {
buf[i] = analogRead(analogPin);
if (buf[i] > imax) imax=buf[i];
if (buf[i] < imin) imin=buf[i];
// Serial.print(buf[i]);
// Serial.print(" ");
}
// Serial.print("imin=");
// Serial.print(imin);
// Serial.print(" imax=");
// Serial.println(imax);
//Set Histgram
for(i=0;i<s_size;i++) {
tmp=buf[i]-imin;
if(tmp < h_size) hist[tmp]++;
}
//Get Max Histgram
tmp=0;
for(i=0;i<h_size;i++) {
// Serial.print(hist[i]);
// Serial.print(" ");
if (hist[i] > tmp) {
tmp=hist[i];
pos=i;
}
}
// Serial.print(" pos=");
// Serial.println(pos);
A_val=imin+pos;
return A_val;
}
|