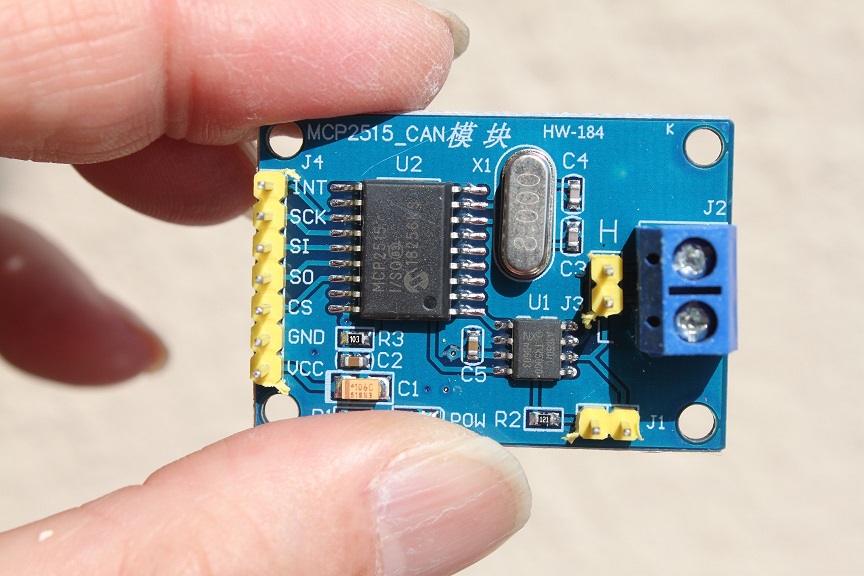

// Initialize MCP2515 running at
8MHz with a baudrate of 500kb/s and the masks and filters
disabled. |

| byte sndStat; if ( (header % 2) == 0 ) { sndStat = CAN0.sendMsgBuf(0x123, 0, 8, data); } else { sndStat = CAN0.sendMsgBuf(0x12345678, 1, 8, data); } |



