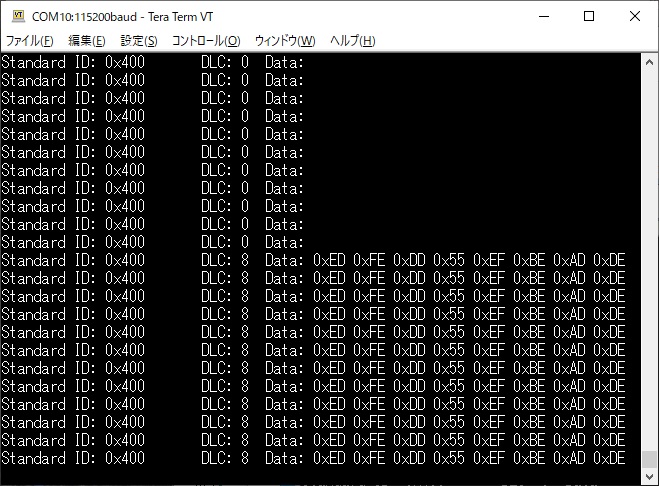
void sendData()
{
CAN_FRAME outgoing;
outgoing.id = 0x400;
outgoing.extended = false;
outgoing.priority = 4; //0-15 lower is
higher priority
outgoing.length =
8;
outgoing.data.s0 = 0xFEED;
outgoing.data.byte[2] = 0xDD;
outgoing.data.byte[3] = 0x55;
outgoing.data.high = 0xDEADBEEF;
Can0.sendFrame(outgoing);
} |