#include <string.h>
#include "espressif/esp_common.h"
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "message_buffer.h"
#include <esp/uart.h>
#include <esp/uart_regs.h>
#include <stdarg.h>
MessageBufferHandle_t xMessageBuffer;
//https://qiita.com/kurasho/items/1f6e04ab98d70b582ab7
void _printf( const char *format, ... )
{
char buffer[64];
va_list ap;
// 可変長引数を1個の変数にまとめる
va_start( ap, format );
// まとめられた変数で処理する
//vprintf( format, ap );
vsnprintf( buffer, sizeof(buffer),
format, ap );
xMessageBufferSend( xMessageBuffer, (
void * ) buffer,
strlen( buffer ), 0 );
va_end( ap );
// 戻り値省略
}
void __printf( const char *format, ... )
{
va_list ap;
TickType_t nowTick;
nowTick = xTaskGetTickCount();
printf("[%s:%d]
",pcTaskGetName(0),nowTick);
// 可変長引数を1個の変数にまとめる
va_start( ap, format );
// まとめられた変数で処理する
vprintf( format, ap );
va_end( ap );
// 戻り値省略
}
void debug_print(void *pvParameters){
__printf("Start\n");
/* Activate UART for GPIO2 */
gpio_set_iomux_function(2,
IOMUX_GPIO2_FUNC_UART1_TXD);
/* Set baud rate of UART1 to 115200 */
uart_set_baud(1, 115200);
/* Set to 1 stopbits */
uart_set_stopbits(1, UART_STOPBITS_1);
/* Enable parity bit */
//uart_set_parity_enabled(1, true);
/* Set parity bit to even */
//uart_set_parity(1, UART_PARITY_EVEN);
size_t xBytesReceived;
char ucRxData[ 100 ];
while(1) {
xBytesReceived =
xMessageBufferReceive( xMessageBuffer,
( void * ) ucRxData,
sizeof( ucRxData ),
portMAX_DELAY );
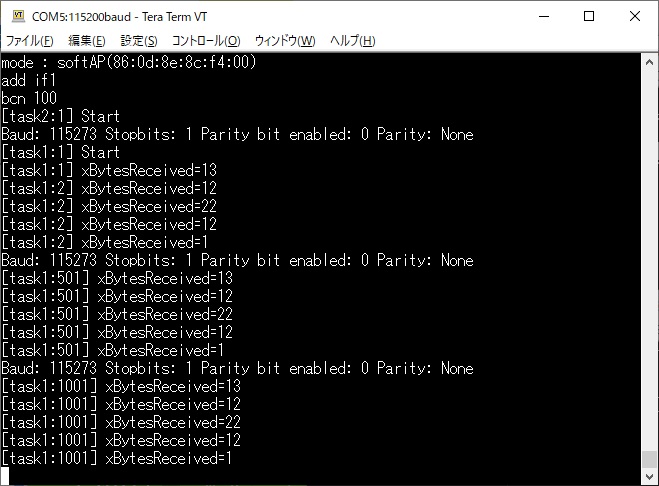
__printf("xBytesReceived=%d\n",xBytesReceived);
if (xBytesReceived != 0) {
ucRxData[xBytesReceived] = 0;
for(int
i=0;i<xBytesReceived;i++) {
if
(ucRxData[i] == '\n') {
uart_putc(1, 0x0d);
uart_putc(1, 0x0a);
}
else {
uart_putc(1, ucRxData[i]);
}
}
uart_flush_txfifo(1);
}
}
}
void uart_print_config(void *pvParameters){
__printf("Start\n");
for(;;) {
/* Get data */
int baud =
uart_get_baud(1);
UART_StopBits
stopbits = uart_get_stopbits(1);
bool
parity_enabled = uart_get_parity_enabled(1);
UART_Parity
parity = uart_get_parity(1);
/* Print to
UART0 */
printf("Baud:
%d ", baud);
_printf("Baud:
%d ", baud);
switch(stopbits){
case
UART_STOPBITS_0:
printf("Stopbits: 0 ");
_printf("Stopbits: 0 ");
break;
case
UART_STOPBITS_1:
printf("Stopbits: 1 ");
_printf("Stopbits: 1 ");
break;
case
UART_STOPBITS_1_5:
printf("Stopbits: 1.5 ");
_printf("Stopbits: 1.5 ");
break;
case
UART_STOPBITS_2:
printf("Stopbits: 2");
_printf("Stopbits: 2");
break;
default:
printf("Stopbits: Error");
_printf("Stopbits: Error");
}
printf("Parity
bit enabled: %d ", parity_enabled);
_printf("Parity
bit enabled: %d ", parity_enabled);
if
(parity_enabled) {
switch(parity){
case UART_PARITY_EVEN:
printf("Parity: Even");
_printf("Parity: Even");
break;
case UART_PARITY_ODD:
printf("Parity: Odd");
_printf("Parity: Odd");
break;
default:
printf("Parity: Error");
_printf("Parity: Error");
}
} else {
printf("Parity: None");
_printf("Parity: None");
}
printf("\n");
_printf("\n");
vTaskDelay(5000
/ portTICK_PERIOD_MS);
}
}
void user_init(void){
uart_set_baud(0, 115200);
printf("SDK version:%s\n",
sdk_system_get_sdk_version());
const size_t xMessageBufferSizeBytes =
100;
/* Create a message buffer that can
hold 100 bytes. The memory used to hold
both the message buffer structure and
the data in the message buffer is
allocated dynamically. */
xMessageBuffer = xMessageBufferCreate(
xMessageBufferSizeBytes );
configASSERT( xMessageBuffer );
xTaskCreate(debug_print, "task1", 256,
NULL, 2, NULL);
xTaskCreate(uart_print_config, "task2",
256, NULL, 3, NULL);
}
|