esp-link傪巊偭偰傒傞
儕儌乕僩僐儞僜乕儖
esp-link傪WiFi僽儕僢僕偲偟偰巊偆弨旛偑偱偒傑偟偨偺偱丄偝偭偦偔儕儌乕僩僐儞僜乕儖傪巊偭偰傒傑偡丅
esp-link偺IP傾僪儗僗傪巊偭偰僽儔僂僓乕偱傾僋僙僗偟傑偡丅
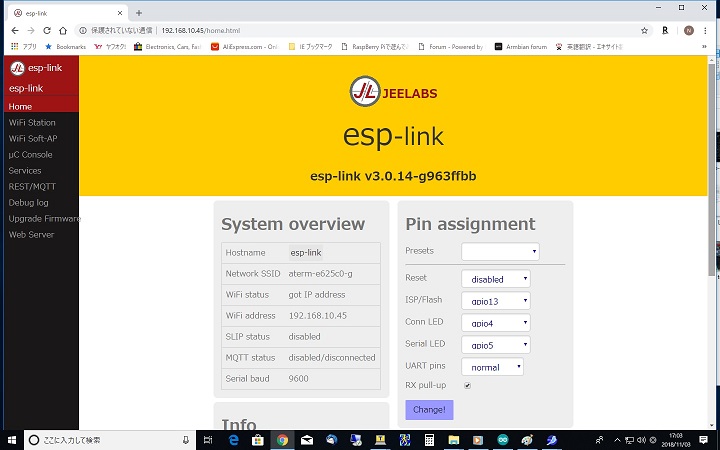
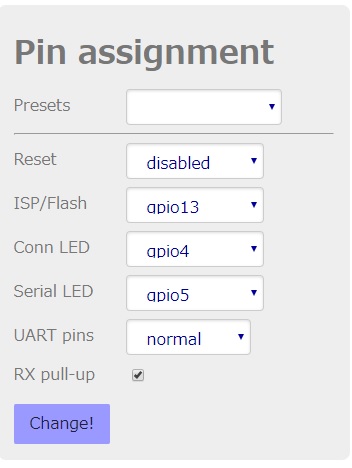
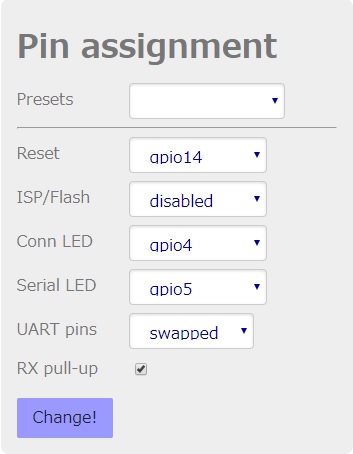
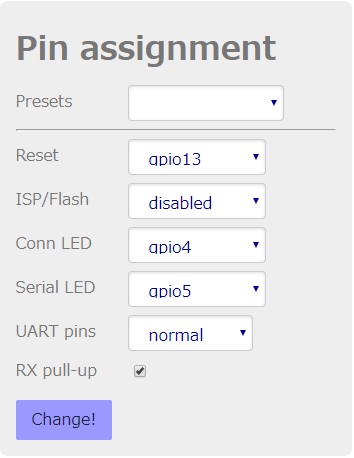
嵟弶偵Pin assignment偱丄Conn LED 偲 Serial LED 傪愝掕偟傑偡丅
崱夞ESP-12傪巊偄傑偟偨偺偱丄Conn LED偵偼gpio4丂Serial LED偵偼gpio5傪妱傝偮偗傑偟偨丅
Conn LED偱偼LED偺揰柵偵傛傝丄WiFi偺愙懕忬懺偑暘偐傝傑偡丅
Serial LED偼壗傜偐偺UART捠怣偑偁傞偲堦弖岝傝傑偡丅
偙傟偵崌傢偣偰丄ESP-12偺GPIO4偲GPIO5偵LED傪愙懕偟傑偡丅
Pin assignment偺曄峏偼esp-link傪嵞婲摦偡傞偙偲側偔丄Change偱捈偪偵斀塮偝傟傑偡丅
崱夞丄儕儌乕僩偱憖嶌偡傞儅僀僐儞偼Arduino傪巊偄傑偟偨丅
Arduino偵僔儕傾儖弌椡傪峴偆揔摉側僗働僢僠傪彂偒崬傫偱丄Arduino偺TX/RX偲ESP偺TX/RX傪僋儘僗偱愙懕偟傑偡丅
ESP8266偺GPIO億乕僩偼5V
tolerant側偺偱丄儗儀儖僔僼僩偼晄梫偱偡丅
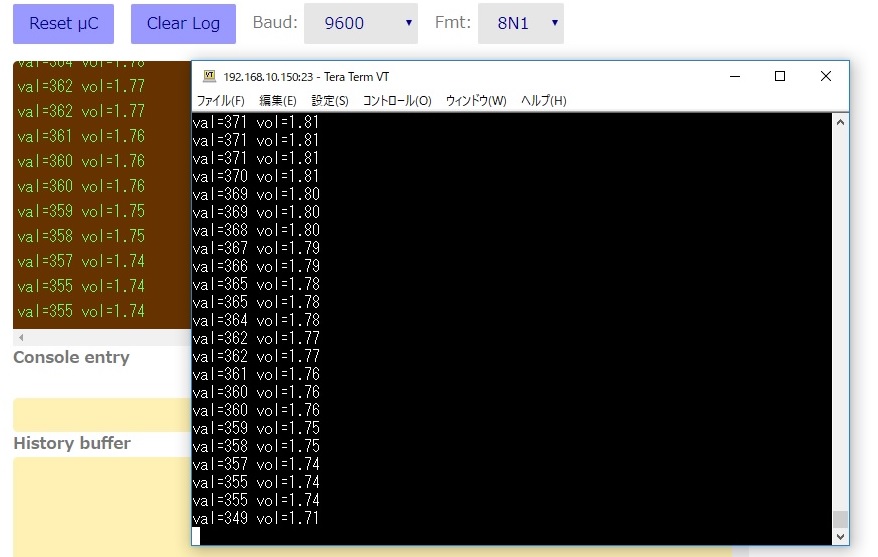
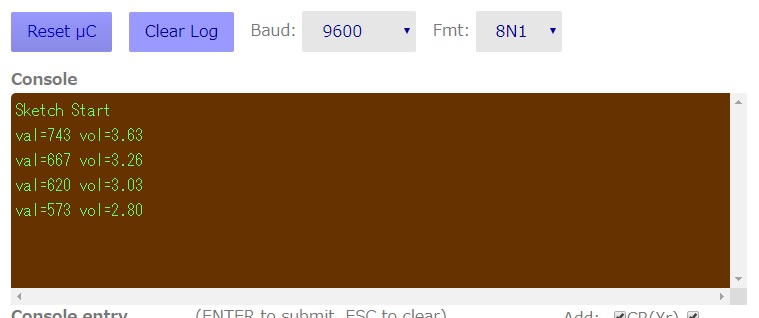
Console儁乕僕偺Baud(儃乕儗乕僩)傪Arduino懁偺UART儃乕儗乕僩偲崌傢偣傞偲丄
Arduino偺僔儕傾儖弌椡偑昞帵偝傟傑偡丅
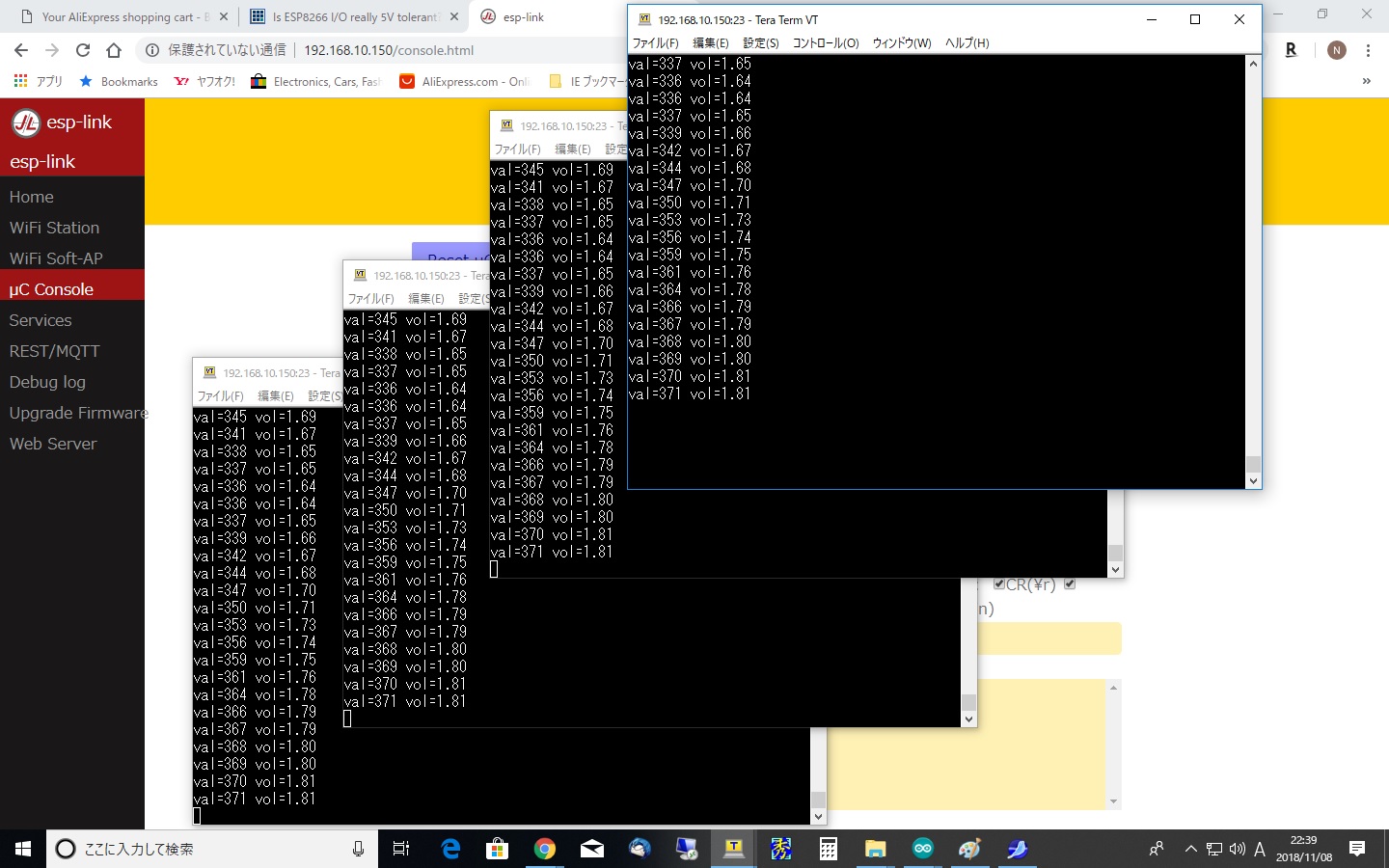
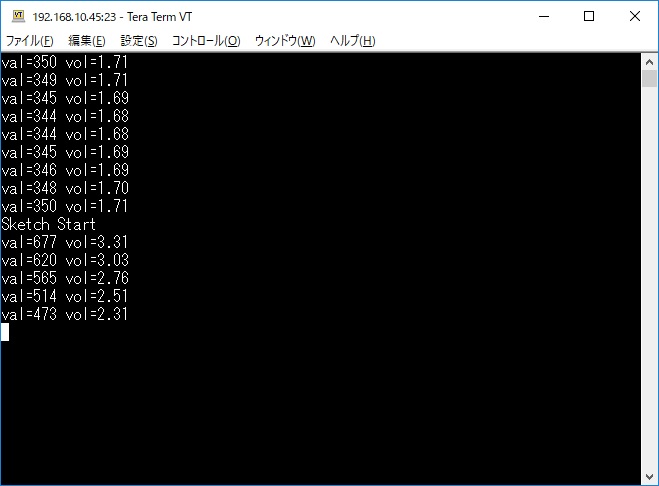
傑偨丄TeraTerm偺Telnet婡擻偱esp-link偺傾僪儗僗偵愙懕偡傞偲丄偙偪傜偵傕Arduino偺僔儕傾儖弌椡偑昞帵偝傟傑偡丅
壗傕昞帵偝傟側偄偲偒偼丄Arduino傪儕僙僢僩偡傞偲昞帵傪奐巒偟傑偡丅
Arduino偺僗働僢僠偼壗傕曄峏偡傞昁梫偑側偄偲偙傠偑慺惏傜偟偄偱偡丅
telnet愙懕偼摨帪偵4偮傑偱庴偗晅偗傞偙偲偑偱偒傑偡丅
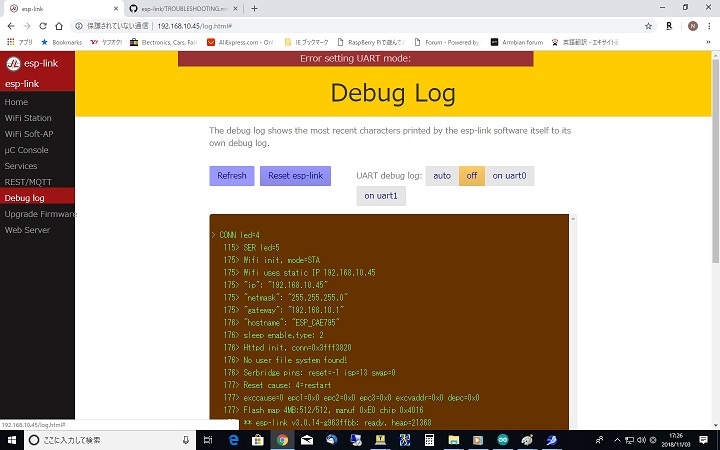
esp-link偼婲摦帪偵埲壓偺僨僶僢僌儘僌傪UART億乕僩偵弌椡偟傑偡丅
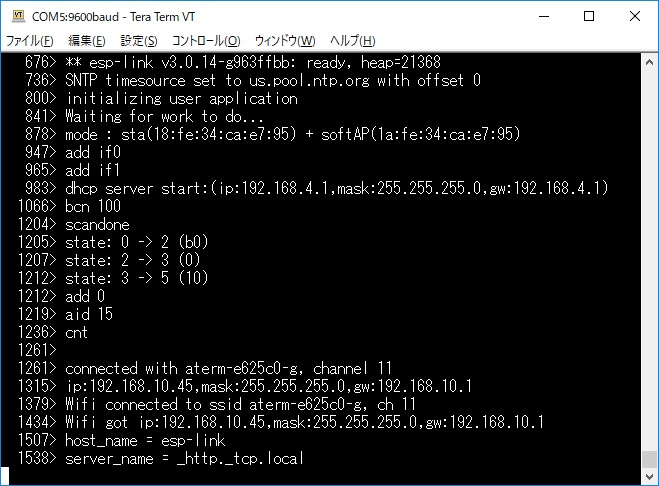
Debug Log偺儁乕僕偱UART debug log傪off偵偡傞偲偙偺弌椡偑弌側偔側傝傑偡偑丄
儕僙僢僩帪偺boot儊僢僙乕僕偩偗偼梷巭偱偒傑偣傫丅
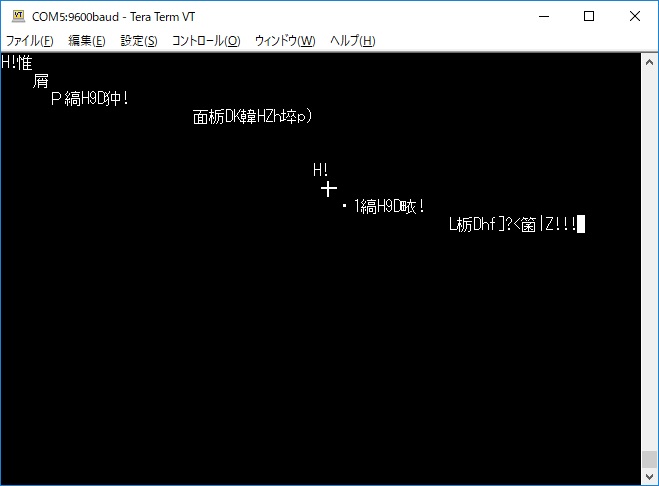
儕僙僢僩帪偺boot儊僢僙乕僕偼74800bps偱昞帵偝傟傞偺偱丄TeraTerm偱偼埲壓偺傛偆偵暥帤壔偗偟傑偡丅
愙懕偟偰偄傞儅僀僐儞偑UART偐傜偺擖椡傪峴偆応崌丄boot儊僢僙乕僕偼幾杺偵側傝傑偡丅
Home儁乕僕偺UART
Pins偱swapped傪巜掕偡傞偲丄ESP懁偺TXD2(GPIO15)乛RXD2(GPIO13)偑桳岠偵側傝丄
boot儊僢僙乕僕偑憡庤偵撏偐側偔側傝傑偡丅
亙曗懌亜
惓妋偵偼boot儊僢僙乕僕偼TX偵弌椡偝傟傑偡偑丄TX偼Arduino偵愙懕偝傟偰偄側偄偺偱撏偒傑偣傫丅
esp-link偑婲摦偡傞偲嵟弶偵UART偺SWAP傪峴偄TXD2/RXD2傪桳岠偵偟傑偡丅
偦偺屻偼TXD2/RXD2偱Arduino偲捠怣偟傑偡丅
UART傪SWAP偟偨帪偼丄GPIO13偲GPIO15傪丄懠偺婡擻偱偼巊傢側偄條偵曄峏偡傞昁梫偑桳傝傑偡丅
UART傪SWAP偟偨帪偼丄Arduino偺TX/RX偲ESP偺TXD2(GPIO15)/RXD2(GPIO13)傪僋儘僗偱愙懕偟傑偡丅
esp-link偵偼憡庤偺儅僀僐儞傪丄WEB憖嶌偱儕僙僢僩偡傞婡擻偑桳傝傑偡丅
Home儁乕僕偺Pin assignment偱ISP/FLASH傪disable偵曄峏偟丄Reset僺儞偵gpio13傪妱傝摉偰傑偟偨丅
Arduino偺RESET億乕僩偲丄ESP偺GPIO13傪愙懕偟丄Console儁乕僕偱乽Reset
uC乿傪巜掕偡傞偲丄Arduino偑儕僙僢僩偟傑偡丅
Arduino傪儕僙僢僩偟偰傕Telnet愙懕偼愗傟傑偣傫丅
儕僙僢僩億乕僩偺偁傞儅僀僐儞側傜偽丄偳傟偱傕WEB儁乕僕偐傜墦妘偱儕僙僢僩偡傞偙偲偑偱偒傑偡丅
懕偔丏丏丏