#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "Arduino.h"
#include "WiFi.h"
#include "esp_freertos_hooks.h"
#include "lwip/err.h"
#include "lwip/sockets.h"
#include "lwip/sys.h"
#include "lwip/netdb.h"
#include "lwip/dns.h"
#define UDP_PORT 9876
const char* WIFI_SSID = "SSID";
const char* WIFI_PASS = "PASSWORD";
long total_idle_count;
long core0_idle_count;
long core1_idle_count;
long total_tick_count;
long core0_tick_count;
long core1_tick_count;
typedef struct {
long total_idle_count;
long core0_idle_count;
long core1_idle_count;
long total_tick_count;
long core0_tick_count;
long core1_tick_count;
} COUNTER_t;
QueueHandle_t xQueue;
SemaphoreHandle_t xSemaphore0;
SemaphoreHandle_t xSemaphore1;
SemaphoreHandle_t xSemaphore2;
//
https://qiita.com/koara-local/items/585755faac70c8b37b5b
// [C++11 ~] variadic templates
template <typename ... Args>
void _printf(const char *format, Args const & ...
args) {
// xSemaphoreTake(xSemaphore0,
portMAX_DELAY);
TickType_t _nowTick =
xTaskGetTickCount();
char * _taskName = pcTaskGetTaskName(
NULL );
printf("[%s:%d] ",_taskName, _nowTick);
printf(format, args ...);
// xSemaphoreGive(xSemaphore0);
}
//時間稼ぎ
void ConsumptionTick(int delay) {
TickType_t startTick;
TickType_t endTick;
TickType_t nowTick;
startTick = xTaskGetTickCount();
endTick = startTick + delay;
while(1) {
nowTick =
xTaskGetTickCount();
if (nowTick > endTick)
break;
}
return;
}
void showNetworkInfo() {
IPAddress ip = WiFi.localIP();
IPAddress mk = WiFi.subnetMask();
IPAddress gw = WiFi.gatewayIP();
_printf("IP address=%d.%d.%d.%d\n",
ip[0], ip[1], ip[2], ip[3]);
_printf("Netmask
=%d.%d.%d.%d\n", mk[0], mk[1], mk[2], mk[3]);
_printf("Gateway
=%d.%d.%d.%d\n", gw[0], gw[1], gw[2], gw[3]);
}
bool ApplicationIdleHook(void)
{
total_idle_count++;
return true;
}
bool Core0IdleHook(void)
{
core0_idle_count++;
return true;
}
bool Core1IdleHook(void)
{
core1_idle_count++;
return true;
}
void ApplicationTickHook(void)
{
total_tick_count++;
}
void Core0TickHook(void)
{
core0_tick_count++;
}
void Core1TickHook(void)
{
core1_tick_count++;
}
void clearHook() {
total_idle_count = 0;
core0_idle_count = 0;
core1_idle_count = 0;
total_tick_count = 0;
core0_tick_count = 0;
core1_tick_count = 0;
}
void printHook(char * title) {
TickType_t nowTick;
nowTick = xTaskGetTickCount();
printf("[%d] %s\n", nowTick,title);
printf("[%d] total_idle_count=%ld
total_tick_count=%ld\n",
nowTick,total_idle_count,total_tick_count);
float idleRate;
idleRate = float(core0_idle_count) /
float(core0_tick_count) * 100.0;
printf("[%d] core0_idle_count=%ld
core0_tick_count=%ld idleRate=%.2f\n",
nowTick,core0_idle_count,core0_tick_count,idleRate);
idleRate = float(core1_idle_count) /
float(core1_tick_count) * 100.0;
printf("[%d] core1_idle_count=%ld
core1_tick_count=%ld idleRate=%.2f\n",
nowTick,core1_idle_count,core1_tick_count,idleRate);
}
#if 1
// Monitor Task
static void monitorTask(void *pvParameters)
{
COUNTER_t mess;
_printf("start Priority=%d
CoreID=%d\n",uxTaskPriorityGet(NULL),xPortGetCoreID());
/* set up address to connect to */
struct sockaddr_in addr;
memset(&addr, 0, sizeof(addr));
addr.sin_family = AF_INET;
addr.sin_port = htons(UDP_PORT);
addr.sin_addr.s_addr =
htonl(INADDR_BROADCAST); /* send message to
255.255.255.255 */
/* create the socket */
int fd;
int ret;
fd = lwip_socket(AF_INET, SOCK_DGRAM,
IPPROTO_UDP ); // Create a UDP socket.
LWIP_ASSERT("fd >= 0", fd >= 0);
float idleRate;
char buffer[128];
int buflen;
while (1) {
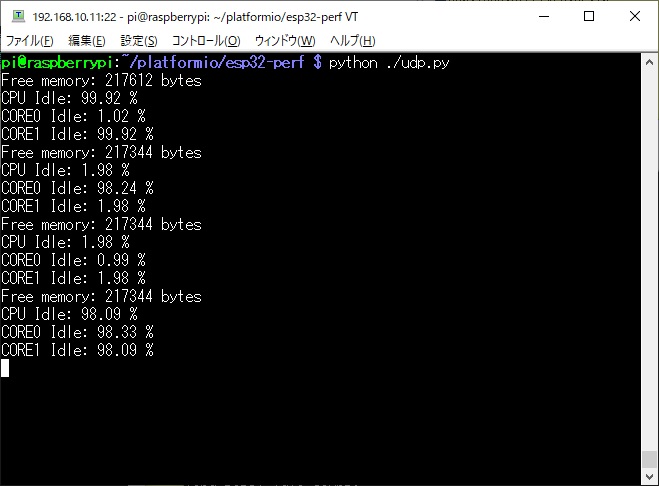
xQueueReceive(xQueue, &mess, portMAX_DELAY);
sprintf(buffer,"Free memory: %d bytes\n",
esp_get_free_heap_size());
buflen =
strlen(buffer);
ret =
lwip_sendto(fd, buffer, buflen, 0, (struct sockaddr
*)&addr, sizeof(addr));
LWIP_ASSERT("ret == buflen", ret == buflen);
_printf("lwip_sendto ret=%d\n",ret);
idleRate =
(float)mess.total_idle_count/(float)mess.total_tick_count*100.0;
if (idleRate
> 100.0) idleRate = 100.0;
sprintf(buffer,"CPU Idle: %.2f %%\n", idleRate);
buflen =
strlen(buffer);
ret =
lwip_sendto(fd, buffer, buflen, 0, (struct sockaddr
*)&addr, sizeof(addr));
LWIP_ASSERT("ret == buflen", ret == buflen);
idleRate =
(float)mess.core0_idle_count/(float)mess.core0_tick_count*100.0;
if (idleRate
> 100.0) idleRate = 100.0;
sprintf(buffer,"CORE0 Idle: %.2f %%\n", idleRate);
buflen =
strlen(buffer);
ret =
lwip_sendto(fd, buffer, buflen, 0, (struct sockaddr
*)&addr, sizeof(addr));
LWIP_ASSERT("ret == buflen", ret == buflen);
idleRate =
(float)mess.core1_idle_count/(float)mess.core1_tick_count*100.0;
if (idleRate
> 100.0) idleRate = 100.0;
sprintf(buffer,"CORE1 Idle: %.2f %%\n\n", idleRate);
buflen =
strlen(buffer);
ret =
lwip_sendto(fd, buffer, buflen, 0, (struct sockaddr
*)&addr, sizeof(addr));
LWIP_ASSERT("ret == buflen", ret == buflen);
} // end while
vTaskDelete(NULL);
}
#endif
#if 0
// Monitor Task
static void monitorTask(void *pvParameters)
{
COUNTER_t mess;
_printf("start Priority=%d
CoreID=%d\n",uxTaskPriorityGet(NULL),xPortGetCoreID());
float idleRate;
while (1) {
xQueueReceive(xQueue, &mess, portMAX_DELAY);
_printf("Free
memory: %d bytes\n", esp_get_free_heap_size());
idleRate =
(float)mess.total_idle_count/(float)mess.total_tick_count*100.0;
if (idleRate
> 100.0) idleRate = 100.0;
_printf("CPU
Idle: %.2f %%\n", idleRate);
idleRate =
(float)mess.core0_idle_count/(float)mess.core0_tick_count*100.0;
if (idleRate
> 100.0) idleRate = 100.0;
_printf("CORE0
Idle: %.2f %%\n", idleRate);
idleRate =
(float)mess.core1_idle_count/(float)mess.core1_tick_count*100.0;
if (idleRate
> 100.0) idleRate = 100.0;
_printf("CORE1
Idle: %.2f %%\n\n", idleRate);
} // end while
vTaskDelete(NULL);
}
#endif
// Performance Task
void perfTask(void *pvParameters)
{
COUNTER_t mess;
_printf("start Priority=%d
CoreID=%d\n",uxTaskPriorityGet(NULL),xPortGetCoreID());
while(1) {
clearHook();
vTaskDelay(10000 /
portTICK_PERIOD_MS);
//printHook("perf");
mess.total_idle_count =
total_idle_count;
mess.core0_idle_count =
core0_idle_count;
mess.core1_idle_count =
core1_idle_count;
mess.total_tick_count =
total_tick_count;
mess.core0_tick_count =
core0_tick_count;
mess.core1_tick_count =
core1_tick_count;
xQueueOverwrite(xQueue,
&mess);
}
}
// Dummy Task
void dummyTask(void *pvParameters)
{
SemaphoreHandle_t *_Semaphore =
(SemaphoreHandle_t *)pvParameters;
_printf("start Priority=%d
CoreID=%d\n",uxTaskPriorityGet(NULL),xPortGetCoreID());
while(1) {
xSemaphoreTake(*_Semaphore,
portMAX_DELAY);
_printf("Take
Semaphore\n");
for(int i=0;i<100;i++) {
ConsumptionTick(99);
vTaskDelay(1);
}
}
}
void setup() {
delay(2000);
_printf("start Priority=%d
CoreID=%d\n",uxTaskPriorityGet(NULL),xPortGetCoreID());
/* Connect WiFi */
_printf("Connecting to
%s\n",WIFI_SSID);
WiFi.mode(WIFI_STA);
WiFi.begin(WIFI_SSID, WIFI_PASS);
while (WiFi.status() != WL_CONNECTED) {
_printf("Wait for
connect....\n");
vTaskDelay(5000 /
portTICK_PERIOD_MS);
}
_printf("WiFi connected\n");
showNetworkInfo();
/* Create queue */
xQueue = xQueueCreate( 1,
sizeof(COUNTER_t) );
configASSERT( xQueue );
/* Create Semaphore */
xSemaphore0 = xSemaphoreCreateBinary();
xSemaphore1 = xSemaphoreCreateBinary();
xSemaphore2 = xSemaphoreCreateBinary();
configASSERT( xSemaphore0 );
configASSERT( xSemaphore1 );
configASSERT( xSemaphore2 );
esp_register_freertos_idle_hook(&ApplicationIdleHook);
esp_register_freertos_tick_hook(&ApplicationTickHook);
esp_register_freertos_idle_hook_for_cpu(&Core0IdleHook,0);
esp_register_freertos_idle_hook_for_cpu(&Core1IdleHook,1);
esp_register_freertos_tick_hook_for_cpu(&Core0TickHook,0);
esp_register_freertos_tick_hook_for_cpu(&Core1TickHook,1);
xTaskCreate(monitorTask, "monitor",
4096, NULL, 2, NULL);
xTaskCreate(perfTask, "perf", 4096,
NULL, 2, NULL);
xTaskCreatePinnedToCore(dummyTask,
"dummy0", 4096, &xSemaphore1, 1, NULL, 0);
xTaskCreatePinnedToCore(dummyTask,
"dummy1", 4096, &xSemaphore2, 1, NULL, 1);
for(int i=0;i<100;i++) {
if ( (i % 4) == 0)
xSemaphoreGive(xSemaphore1);
if ( (i % 4) == 1)
xSemaphoreGive(xSemaphore2);
if ( (i % 4) == 2) {
xSemaphoreGive(xSemaphore1);
xSemaphoreGive(xSemaphore2);
}
vTaskDelay(10000 /
portTICK_PERIOD_MS);
}
vTaskDelete( NULL );
}
void loop() { // Never run
_printf("loop\n");
}
|