#include "freertos/FreeRTOS.h"
#include "Arduino.h"
#include "WiFi.h"
#include "ESPmDNS.h"
#include "lwip/err.h"
#include "lwip/sockets.h"
#include "lwip/sys.h"
#include "lwip/netdb.h"
#include "lwip/dns.h"
#define SERVER_IP "192.168.10.10"
#define SEND_PORT 9876
#define RECEIVE_PORT 9877
const char* WIFI_SSID = "SSID";
const char* WIFI_PASS = "PASSWORD";
//
https://qiita.com/koara-local/items/585755faac70c8b37b5b
// [C++11 ~] variadic templates
template <typename ... Args>
void _printf(const char *format, Args const & ...
args) {
// int printf(const char *format, ...);
TickType_t _nowTick =
xTaskGetTickCount();
char * _taskName = pcTaskGetTaskName(
NULL );
printf("[%s:%d] ",_taskName, _nowTick);
printf(format, args ...);
}
#if 0
// [C/C++] stdarg
void _printf(const char *format, ...) {
va_list va;
va_start(va, format);
// int vprintf(const char *format,
va_list ap);
TickType_t _nowTick =
xTaskGetTickCount();
char * _taskName = pcTaskGetTaskName(
NULL );
printf("[%s:%d] ",_taskName, _nowTick);
vprintf(format, va);
va_end(va);
}
#endif
void showNetworkInfo() {
IPAddress ip = WiFi.localIP();
IPAddress mk = WiFi.subnetMask();
IPAddress gw = WiFi.gatewayIP();
_printf("IP address=%d.%d.%d.%d\n",
ip[0], ip[1], ip[2], ip[3]);
_printf("Netmask
=%d.%d.%d.%d\n", mk[0], mk[1], mk[2], mk[3]);
_printf("Gateway
=%d.%d.%d.%d\n", gw[0], gw[1], gw[2], gw[3]);
}
// TCP-IP Server Task
void task1(void *pvParameters)
{
//TickType_t nowTick;
//nowTick = xTaskGetTickCount();
_printf("start
Priority=%d\n",uxTaskPriorityGet( NULL ));
//printf("[%s:%d]
Start\n",pcTaskGetName(0),nowTick);
#if 0
/* wait for Semaphore */
xSemaphoreTake(xSemaphore1,
portMAX_DELAY);
nowTick = xTaskGetTickCount();
printf("[%s:%d]
Take\n",pcTaskGetName(0),nowTick);
#endif
/* set up address to connect to */
struct sockaddr_in srcAddr;
struct sockaddr_in dstAddr;
memset(&srcAddr, 0,
sizeof(srcAddr));
//srcAddr.sin_len = sizeof(srcAddr);
srcAddr.sin_family = AF_INET;
//srcAddr.sin_port =
PP_HTONS(RECEIVE_PORT);
srcAddr.sin_port = htons(RECEIVE_PORT);
srcAddr.sin_addr.s_addr = INADDR_ANY;
/* create the socket */
int srcSocket;
int dstSocket;
socklen_t dstAddrSize;
int ret;
int numrcv;
srcSocket = lwip_socket(AF_INET,
SOCK_STREAM, 0);
LWIP_ASSERT("srcSocket >= 0",
srcSocket >= 0);
/* bind socket */
ret = lwip_bind(srcSocket, (struct
sockaddr *)&srcAddr, sizeof(srcAddr));
/* should succeed */
LWIP_ASSERT("ret == 0", ret == 0);
/* listen socket */
ret = lwip_listen(srcSocket, 5);
/* should succeed */
LWIP_ASSERT("ret == 0", ret == 0);
char buf[1024];
while(1) {
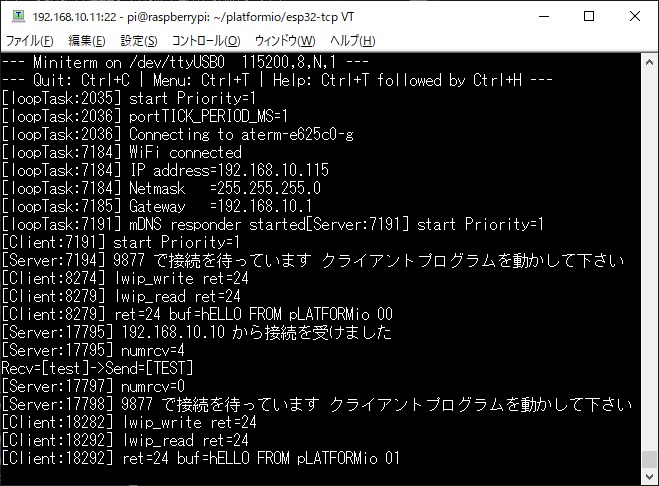
// 接続の受付け
_printf("%d で接続を待っています
クライアントプログラムを動かして下さい\n",RECEIVE_PORT);
dstAddrSize =
sizeof(dstAddr);
dstSocket =
lwip_accept(srcSocket, (struct sockaddr *)&dstAddr,
&dstAddrSize);
//nowTick =
xTaskGetTickCount();
_printf("%s
から接続を受けました\n",inet_ntoa(dstAddr.sin_addr));
while(1) { //
クライアントがSocketをクローズしてからこちらもクローズする
/* read
something */
memset(buf,0,sizeof(buf));
numrcv =
lwip_read(dstSocket, buf, 1024);
//nowTick =
xTaskGetTickCount();
_printf("numrcv=%d\n",numrcv);
if(numrcv ==0
|| numrcv ==-1 ){ // client close socket
lwip_close(dstSocket); break;
}
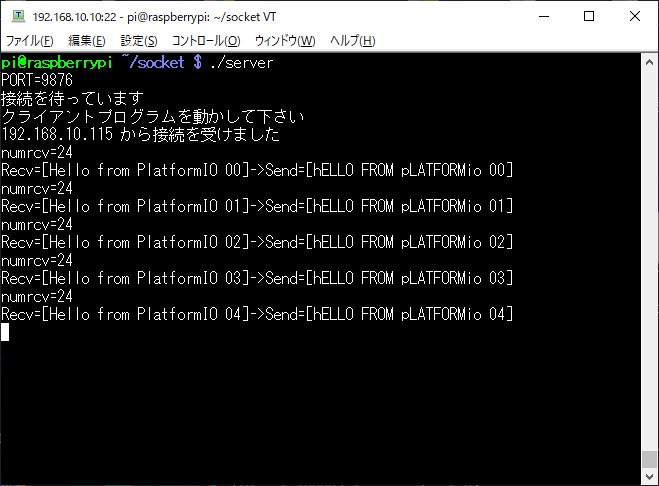
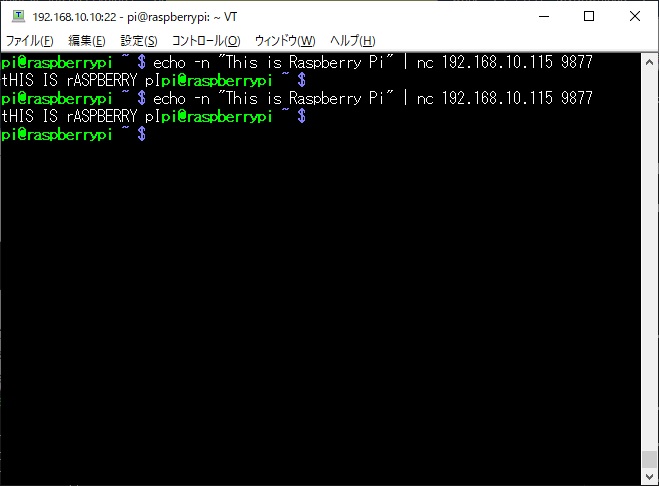
printf("Recv=[%s]",buf);
for (int i=0;
i< numrcv; i++){ // bufの中の小文字を大文字に変換
if(isalpha((int)buf[i])) {
if(islower((int)buf[i])) {
buf[i] = toupper((int)buf[i]);
} else {
buf[i] = tolower((int)buf[i]);
}
}
}
/* write
something */
ret =
lwip_write(dstSocket, buf, numrcv);
LWIP_ASSERT("ret == numrcv", ret == numrcv);
printf("->Send=[%s]\n",buf);
} // end while
} // end for
/* close (never come here) */
ret = lwip_close(srcSocket);
LWIP_ASSERT("ret == 0", ret == 0);
vTaskDelete( NULL );
}
// TCP-IP Client Task
void task2(void *pvParameter)
{
_printf("start
Priority=%d\n",uxTaskPriorityGet( NULL ));
/* set up address to connect to */
struct sockaddr_in addr;
memset(&addr, 0, sizeof(addr));
//addr.sin_len = sizeof(addr);
addr.sin_family = AF_INET;
//addr.sin_port = PP_HTONS(SEND_PORT);
addr.sin_port = htons(SEND_PORT);
addr.sin_addr.s_addr =
inet_addr(SERVER_IP);
/* create the socket */
int fd;
int ret;
fd = lwip_socket(AF_INET, SOCK_STREAM,
0);
LWIP_ASSERT("fd >= 0", fd >= 0);
/* connect */
ret = lwip_connect(fd, (struct
sockaddr*)&addr, sizeof(addr));
/* should succeed */
LWIP_ASSERT("ret == 0", ret == 0);
char buf[256];
for(int i=0;i<10;i++) {
/* write something */
sprintf(buf,"Hello from
PlatformIO %02d",i);
//sprintf(buf,"test
%02d",i);
ret = lwip_write(fd, buf,
strlen(buf));
_printf("lwip_write
ret=%d\n",ret);
LWIP_ASSERT("ret ==
strlen(buf)", ret == strlen(buf));
/* read something */
memset(buf,0,sizeof(buf));
ret = lwip_read(fd, buf,
sizeof(buf));
LWIP_ASSERT("ret > 0",
ret > 0);
_printf("lwip_read
ret=%d\n",ret);
if (ret > 0) {
_printf("ret=%d
buf=%s\n",ret,buf);
}
vTaskDelay(10000 /
portTICK_PERIOD_MS);
} // end for
/* close */
ret = lwip_close(fd);
LWIP_ASSERT("ret == 0", ret == 0);
vTaskDelete( NULL );
}
void setup() {
vTaskDelay(2000 / portTICK_PERIOD_MS);
_printf("start
Priority=%d\n",uxTaskPriorityGet( NULL ));
_printf("portTICK_PERIOD_MS=%d\n",portTICK_PERIOD_MS);
/* Connect WiFi */
_printf("Connecting to
%s\n",WIFI_SSID);
WiFi.mode(WIFI_STA);
WiFi.begin(WIFI_SSID, WIFI_PASS);
while (WiFi.status() != WL_CONNECTED) {
vTaskDelay(5000 /
portTICK_PERIOD_MS);
}
_printf("WiFi connected\n");
showNetworkInfo();
/* Start mDNS responder */
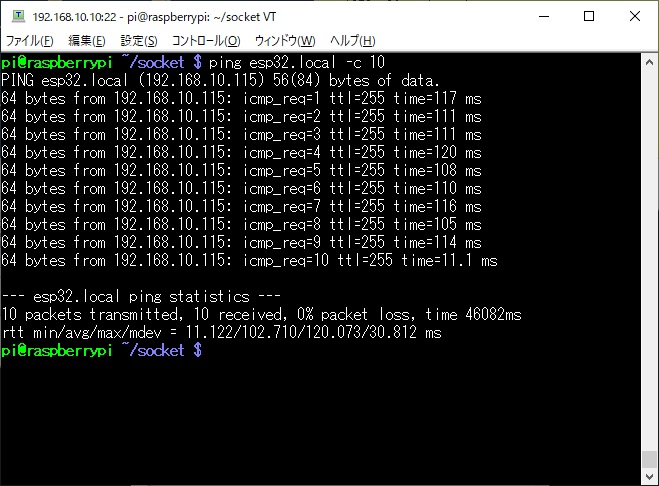
if (!MDNS.begin("esp32")) {
while(1) {
_printf("Error
setting up MDNS responder!");
vTaskDelay(5000
/ portTICK_PERIOD_MS);
}
}
_printf("mDNS responder started");
/* Start TCP-IP Server */
xTaskCreatePinnedToCore(task1,
"Server", 4096, NULL, 1, NULL, tskNO_AFFINITY);
/* Start TCP-IP Client */
xTaskCreatePinnedToCore(task2,
"Client", 4096, NULL, 1, NULL, tskNO_AFFINITY);
/* stop loop task */
vTaskDelete( NULL );
}
void loop() { // Never run
_printf("loop\n");
}
|