/*
* Read MPC3002/MCP3204 with wiringPiSPIDataRW
*/
#include <stdio.h>
#include <stdlib.h>
#include <wiringPi.h>
#include <wiringPiSPI.h>
#define DEBUG 1
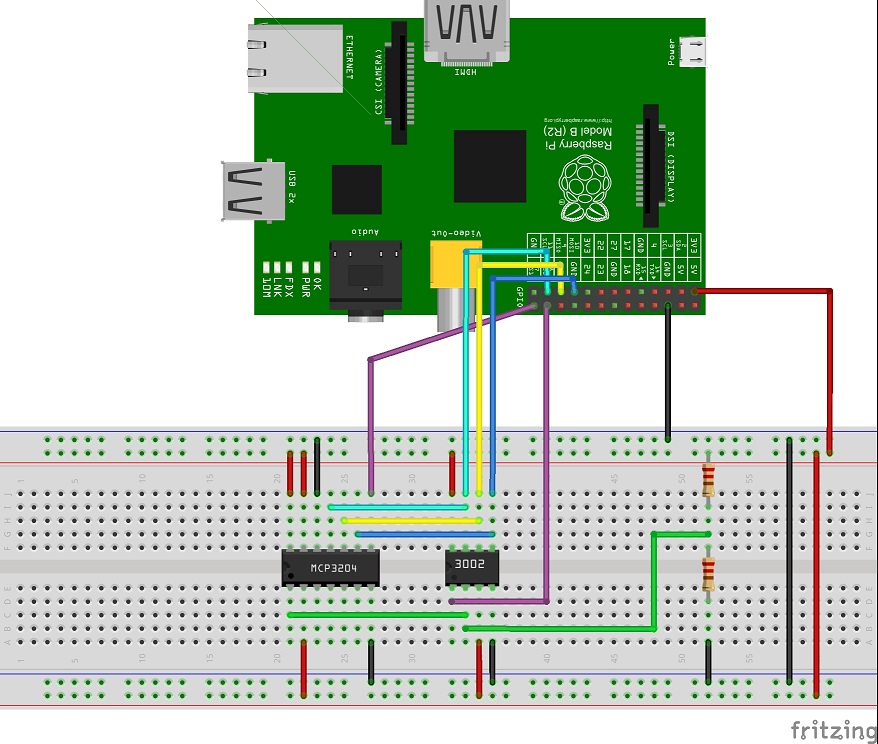
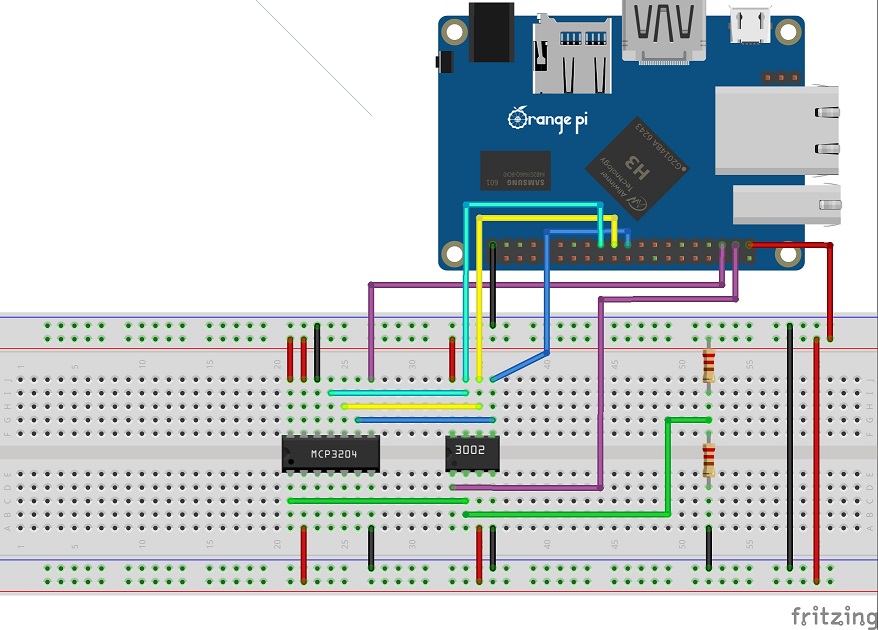
#define SPI0 0 // /dev/spidev0.0
#define CS0 8 // Slave1 ChipSelect
#define CS1 9 // Slave2 ChipSekect
int main(int argc, char **argv){
int retCode;
int i;
int a2dChannel = 0; // analog channel
int a2dVal = 0;
float a2dVol = 0;
float Vref = 3.3;
unsigned char data[3];
if (argc == 2) {
printf("argv[1]=%s\n",argv[1]);
a2dChannel=atoi(argv[1]);
}
if (wiringPiSetup() == -1) {
printf("wiringPiSetup Error\n");
}
pinMode(CS0,OUTPUT);
pinMode(CS1,OUTPUT);
digitalWrite(CS0,HIGH);
digitalWrite(CS1,HIGH);
// SPI channel 0 を 1MHz で開始。
if (wiringPiSPISetup(SPI0, 1000000) < 0)
{
printf("SPISetup failed:\n");
}
for(i=0;i<10;i++) {
digitalWrite(CS0,LOW);
data[0] = 0b01100000 |( ((a2dChannel
& 0x03) << 4)); // first byte
transmitted -> start bit
data[1] = 0; // third byte
transmitted....don't care
if(DEBUG)printf("[MCP3002]data[write]=%02x-%02x\n",data[0],data[1]);
retCode=wiringPiSPIDataRW
(SPI0,data,sizeof(data));
if(DEBUG)printf("[MCP3002]wiringPiSPIDataRW=%d\n",retCode);
if(DEBUG)printf("[MCP3002]data[read]=%02x-%02x\n",data[0],data[1]);
a2dVal = (data[0]<< 8) &
0b1100000000; //first 2 bit
a2dVal |= (data[1] & 0xff);
a2dVol = (float)a2dVal/1023 * Vref;
printf("[MCP3002]a2dVal=%d\n",a2dVal);
printf("[MCP3002]a2dVol=%f[V]\n",a2dVol);
digitalWrite(CS0,HIGH);
sleep(1);
digitalWrite(CS1,LOW);
data[0] = 0b00000110 |( ((a2dChannel
& 0x04) >> 2)); // first byte
transmitted -> start bit -> (SGL/DIF = 1, D2=0)
data[1] = 0b00000000 |( ((a2dChannel
& 0x03) << 6)); // second byte transmitted ->
(D1=D0=0)
data[2] = 0; // third byte
transmitted....don't care
if(DEBUG)printf("[MCP3204]data[write]=%02x-%02x-%02x\n",data[0],data[1],data[2]);
retCode=wiringPiSPIDataRW
(SPI0,data,sizeof(data));
if(DEBUG)printf("[MCP3004]wiringPiSPIDataRW=%d\n",retCode);
if(DEBUG)printf("[MCP3204]data[read]=%02x-%02x-%02x\n",data[0],data[1],data[2]);
a2dVal = (data[1]<< 8) &
0b111100000000; //first 4 bit
a2dVal |= (data[2] & 0xff);
a2dVol = (float)a2dVal/4095 * Vref;
printf("[MCP3204]a2dVal=%d\n",a2dVal);
printf("[MCP3204]a2dVol=%f[V]\n",a2dVol);
digitalWrite(CS1,HIGH);
sleep(1);
}
}
|